
Драйвер биполярного шагового двигателя с поддержкой «микрошага», разработанный товарищами из www.schmalzhaus.com, базируется на микросхеме A3967.
Характеристики:
- Максимальный ток: 750 мА на одну фазу.
- Напряжение привода двигателя: от 7В до 30В.
- Возможность ограничения выходного тока: от 150мА до 750мА
- 1/8, 1/4 и 1/2 микрошаговые режимы работы.
- Управление 3 и 5 вольтовой логикой.
- Не требует отдельного питания логической части, для этого на плате находится стабилизатор LM317.
- Драйвер не поддерживает униполярные двигатели.
Назначение элементов и выводов драйвера:
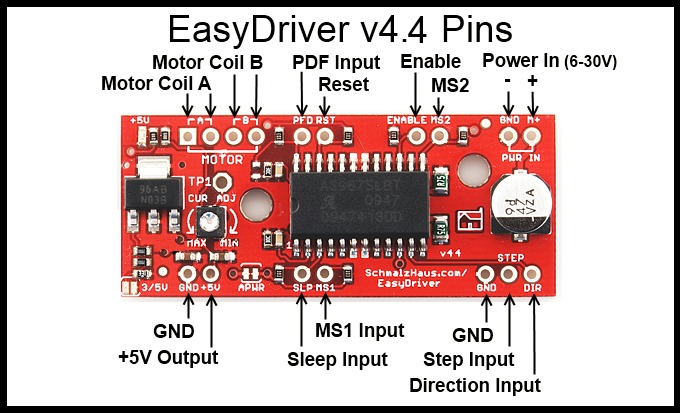
Выводы:
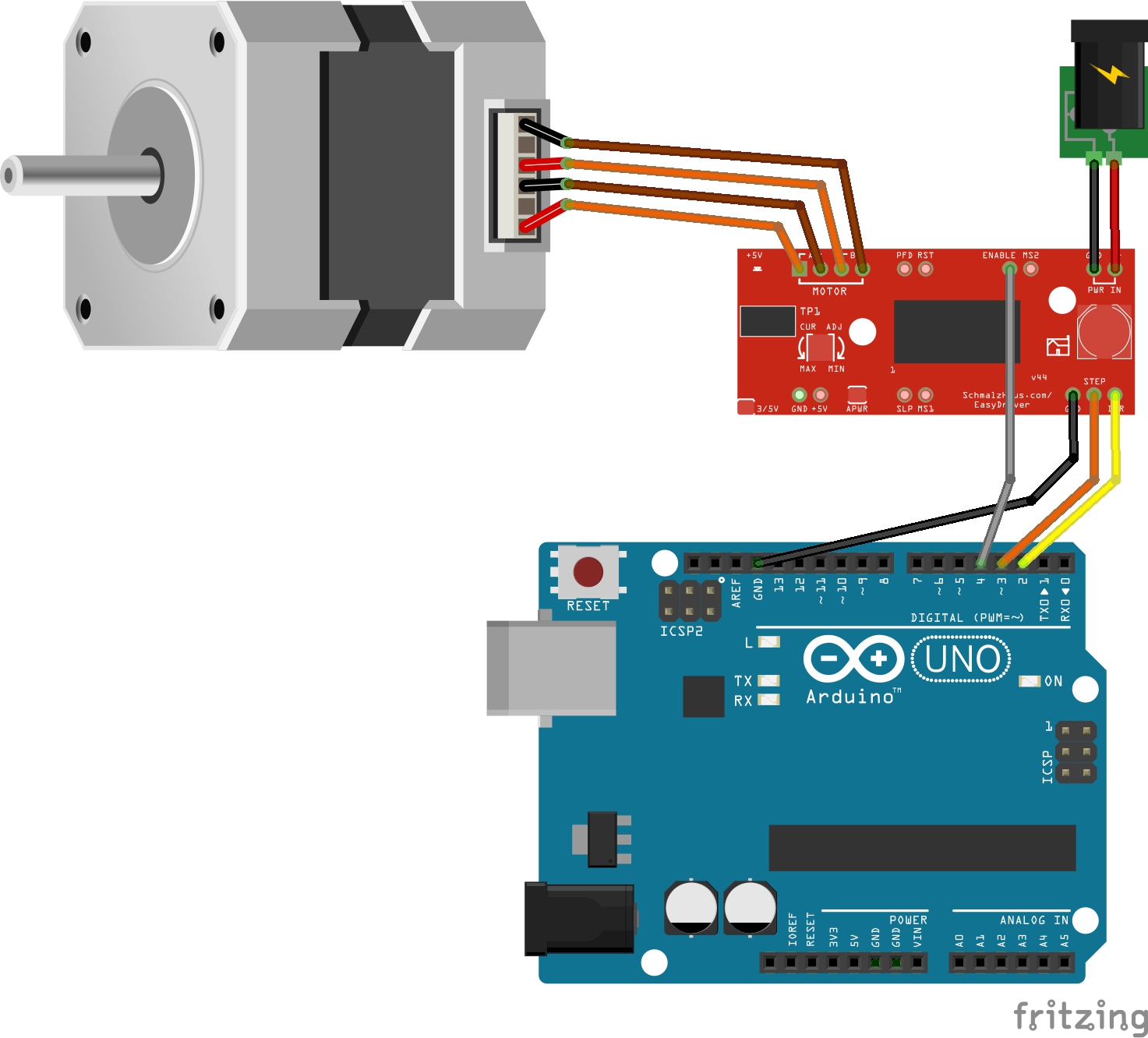
- MOTOR и выходы A и B — Подключение обмоток шагового двигателя. (A+ A- B+ B-)
- PFD — Percent Fast Decay Input, тонкие настройки ШИМ драйвера микросхемы, скорость нарастания ШИМ.
- RST — Сброс драйвера, при низком уровне сбрасывает внутренний транслятор и отключает все выходные драйверы.
- ENABLE — При низком уровне, отключатся все выходы драйвера.
- MS1 и MS2 — Управление микрошаговым режимом. По умолчанию входы притянуты к питанию и выставлен шаг 1/8. Для установки полного шага, на оба входа нужно подать низкий уровень, для полушага только на MS2, для 1/4 шага, только на MS1. (полный шаг (0,0), полушаг (1,0), шаг 1/4 (0,1) и шаг 1/8 (1,1).
- PWR IN и вход M+ — Напряжение питания драйвера и моторов, также это напряжение подается на стабилизатор LM317 для питания логической части микросхемы.
- +5V — Выход напряжения со стабилизатора LM317, можно использовать для питания Arduino
- SLP — Сон, если подать низкий уровень, будет отключена внутренняя схема для минимизации потребления энергии.
- STEP — Шаг, При переходе с низкого уровня на высокий, драйвер делает один шаг или микрошаг, если драйвер работает в микрошаговом режиме.
- DIR — Состояние входа (высокий\низкий) определяет направление вращения двигателя.
- GND — масса, все массы соединены.
Элементы:
- Потенциометр CUR ADJ — Установка ограничения максимального тока подаваемого на двигатель, от 150 мА до 750 мА.
- Перемычка APWR — отключает стабилизатор LM317 от цепи питания 5 вольт. По умолчанию соединена.
- Перемычка 3/5 — Установка напряжения на выходе LM317, 5 или 3.3 вольта, По умолчанию разомкнута.
Кратко про особенности микрошагового режима:
Сверху графики работы драйвера в полношаговом и микошаговом режиме.
В полношагом режиме, драйвер запитывает обмотки двигателя полным током, а направление тока в обмотках двигателя изменяется с каждым шагом. Считается штатным режим работы двигателя. Главное достоинство, простота реализации. Из недостатков, двигатель сильнее подвержен вибрации и резонирует на низких скоростях.
В микрошаговом режиме происходит деление шага, в данном случаи на 8, с каждым шагом обмотки запитаны не полным током, а уровнем изменяемым по синусоидальному закону. Такой метод дает возможность фиксировать вал в промежуточных положениях между шагами, увеличить количество шагов и точность позиционирования вала двигателя, уменьшает вибрацию двигателя, особенно на низких скоростях, но требует применения специализированных драйверов.
Подключение к Arduino:
Купить:
на али, тут.