74HC165, микросхема стандартной логики, входной сдвиговый регистр, позволяет увеличивать количество цифровых входов микроконтроллера. Регистр преобразует параллельный входной сигнал в последовательный выходной, который в последствии считывается микроконтроллером.
Распиновка микросхемы:

- 1 нога, PL, Иногда называется SH/LD, При переходе с высокого значения на низкое, регистр захватывает состояние на восьми входных контактов (D0-D7).
- 2 нога, CP, Тактовый вход, аналогичен SCK в интерфейсе SPI.
- 11-14, 3-6 ноги, D0-D7, Последовательный вход.
- 7 нога, «Q7, Инвертированный последовательный выход, MISO.
- 8 нога, GND, Масса
- 9 нога, Q7, Последовательный выход, MISO.
- 10 нога, DS, Последовательный выход, служит для каскадного подключения регистров.
- 15 нога, «CE, Сlock enable, Включение тактирования.
- 16 нога, Vcc, Питание.
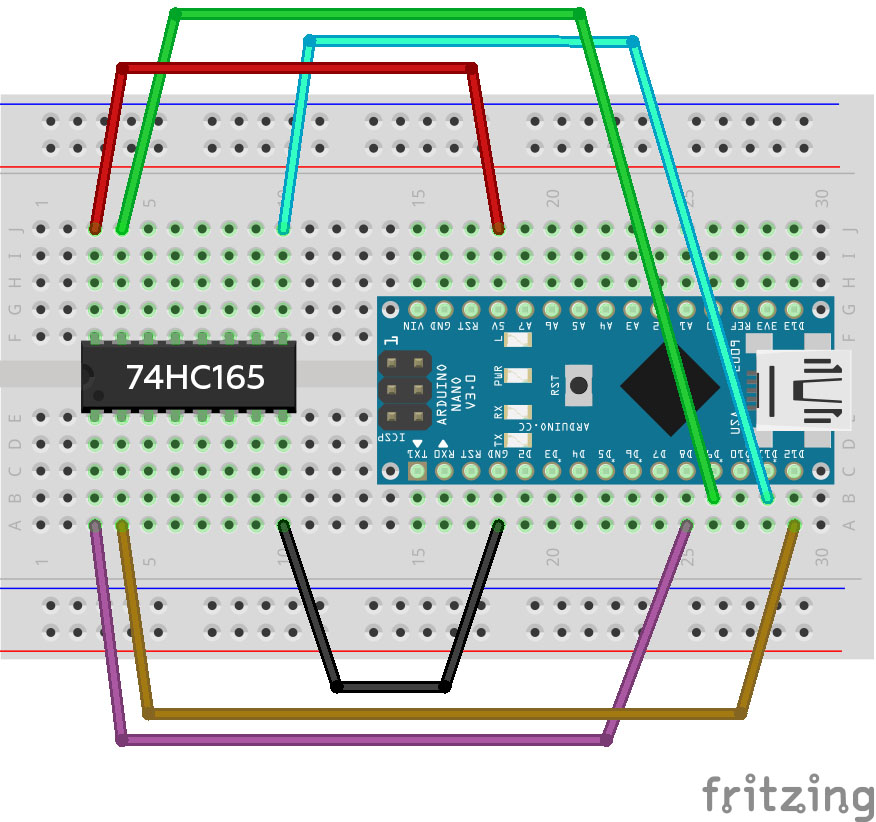
Подключение к Arduino:
Видео: